Всё о технологиях в эхолотах.

Скорей всего все знакомы с принципом работы эхолота. Датчик излучает ультразвуковой сигнал, он отражается от препятствий в воде и возвращается обратно.
Дальше голова эхолота обрабатывает этот сигнал и уже выводить нам на экран определённую информацию.
В современном мире эхолокации в новых моделях эхолотов появляется всё больше и больше непонятных терминов 2D сонар, чирп, даунскан, структурскан, от это начинает кругом идти голова.
Мы постарались облегчить ваши поиски нужной информации и собрали здесь в одном месте, простое краткое описание всех чудес современной эхолокации.
1. Начнём с классики — это 2D сонар / BroadBand
Датчик излучает сигнал в виде конуса
С этих сонаров всё начиналось, поэтому технология старая, но не утратившая свою актуальность. В основном используются двух лучевые датчики с разными углами.
На рисунке вы ведите датчик с лучами 20 и 60 градусов.

Широкий луч охватывал больше пространство под лодкой и довольно хорошо ищет рыбу, но в этом луче сильно размывалось очертания дна. И вот как раз более узкий луч, довольно чётко прорисовывал само дно, его структуру.
Рыба на таких эхолотах показывалась в виде дуги.
Это видно из рисунка ниже.

При движении лодки рыба попадает в луч в точке А затем в центре — точка В и затем в точке С. Вот так получается дуга. В точке В она вогнута к верху, потому что, в этой точке рыба наиболее близко находиться к датчику.
Эта технология и сейчас имеет свои преимущества:
- светит глубоко — пару сотен метров легко
- за счет конуса просвечивается большой объём воды, легче искать рыбу
Есть и недостатки:
- Детализация желает лучшего.
- Все попавшие объекты размер которых меньше чем размер пятна луча, на экране будут выглядит как холм.
- Больше никаких деталей мы не сможем получить.
- Нет возможности определить в каком направлении стоит рыба. Мы видим только дугу и всё. У нас только есть расстояние до неё.
- И конечно же наличии у такого датчика «мёртвых зон». К примеру если глубина резко начинает увеличиваться то сигнал отражается от верхней бровки, а что ниже мы не видим. Или ещё более обидный когда на ровном дне лежит высокое длинное бревно или камень, луч отразиться от его вершины и мы не увидим стоящую на дне возле камня или бревна рыбу.
2. И вот в эхолотах появляется технология нижнего сканирования DownScan.
Всё в мире меняется, и на смену датчику с формой луча в виде конуса приходят датчики которые имеют форму луча в виде «долька лимона».
Вот как это выглядит:
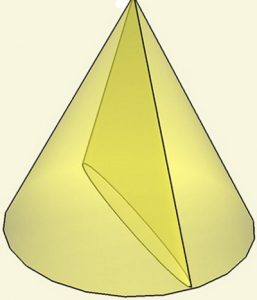
Тут дополним, у разных производителей данная технология называется по разному:
- Garmin – называет её ClearVu
- Lowrance – называет её DownScan
- Humminbird – называет её DownImage
Название разные, но принцип работы один и тот же — луч в продольном и поперечном направлении излучается в форме «дольки лимона» . Где-то мы выигрываем, где-то мы теряем.
Разберёмся. Начнём с потерь. В продольном направлении этот узкий луч составляет пару градусов. Поэтому если рыба находиться буквально в метре от луча она туда не попадает и мы её не видим. Это касается ловли с якоря. В этом случае лучше использовать классический трансдюсер с лучом в виде конуса.
А вот когда лодка движется вот тут технология DownScan проявляется себя на все сто процентов. За счет узкого луча по направлению движения лодки, картинка получается в лучшем разрешении чем у классики.
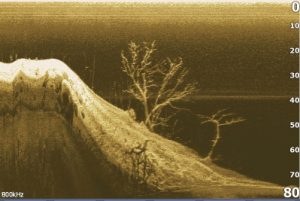
Как пример мы видим на картинке практически каждую веточку, так работает DownScan для классики такая детализация не доступна.
На классике у нас на экране рисовался просто бугор.
Вот ещё пример. Стая рыбы под деревом.
Сейчас на просторах интернета море таких картинок. При желание вбейте в Google “DownScan Imaging” и наслаждайтесь всем разнообразием подводного мира.
На классике рыба отображается в виде дуги, мы это писали выше. А вот DownScan отобразит на экране пятно — это и будет рыба, так как луч узкий.

Вот на картинке рыба определенная эхолотом с классическим трасдюсером и также рыба с DownScan.
Если классика не могла отделить рыбу от дна водоёма то на картинке справа мы видим что DownScan не только определил мелкую рыбешку, но и показал более крупные особи. Зелеными стрелками обозначена — мелочь. Чёрными стрелками указана более крупная рыба.
Вот ещё пример удачного прохождения луча в который попала рыба.

Как заметили картинка с DownScan и картинка с классики отличаются. Достичь идеальной картинки получиться если лодка будет двигаться равномерно. Луч в таком случае будет работать как копировальная машина не пропуская не одной мелочи.
Как видим преимущество DownScan — это детализация до мельчайших подробностей. Есть и недостатки и это:
- меньший угол охвата
- такой луч может проникнуть только на глубину не более 100 метров, но для наших водоёмов это не критично.
Вот несколько моделей эхолотов от Lowrance с технологией DownScan:
3. Разберемся теперь с StructureScan – получившее название боковое сканирование.
Опять же разные производители называют её по разному:
- Lowrance — называют её StructureScan
- Garmin – называют её SideVu
- Hamminbird – называют её SideImage
но смысл один и тот же у всех.
И так возьмём два луча DownScan и изменив их направление, светить будем не в низ а вправо и влево.

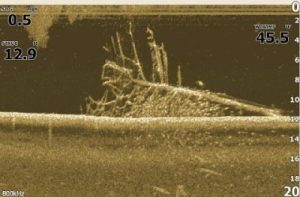
Вот пример с датчика бокового сканирования. Теперь всю информацию нужно отразить на экран эхолота. Как это сделать? Если при классическом сканировании и DownScan мы с боку смотрели на воду , то теперь будем смотреть сверху.
При классике лодка у нас находится вверху и справа. Картинка рисовалась с права налево, то теперь лодка в верху по середине а картинка рисуется с верху в низ.
Вот пример картинки при работе StructureScan.

Картинка рисуется сверху в низ. Вверху экрана по центру — это лодка. Получаем развернутую картинку на плоскости — столб воды с дном по обе стороны лодки.
Давайте разберем картинку и поймем что к чему .

Итак (А) — это середина, отправная точка. В обои стороны до буквы (С) показывается столб воды (В), тот что под лодкой — это тёмная полоса по центру экрана.
Если ширину этой полосы поделить пополам — это будет наша глубина. От этой полосы к краям экрана мы видим дно.
На картинке мы видим тени которые отбрасываю предметы попавшие в наш луч. Как будто в стороны от лодки мы посветили фонарём. Так оно и есть только мы светим не фонарём а ультразвуком.
Чем светлей участок, тем сильнее от него отразился луч. А тени от возвышающихся объектов — это тёмные участки на экране.
Создаётся эффект что дно высушили, мы его подсветили сбоку и теперь видим все объекты на дне с тенями, но а воды нет.
А как же StructureScan покажет рыбу?

Данное фото наглядно нам показывает как на разных технологиях выглядит рыба.
Вот ещё пример: слева стая рыбы и справа крупная особь в виде светлых черточек с тенями.

Какой вывод мы можем сделать из увиденного? Распознать рыбу на DownScan и StructureScan без практики сложнее чем на классике. Нужен опыт.
Вот несколько примеров эхолотов с технологией StuctureScan:
и на конец CHIRP
Все выше перечисленные технологии отличались в форме луча и его направлении.
А вот в технологии CHIRP – это чистота излучения сигнала. Compressed High-Intensity Radiated Pulse (CHIRP) – расшифровывается как высоко-интенсивный импульс.
Эхолоты без технологии CHIRP излучают импульсы одной чистоты и это сигнал короткий.
Эхолот с технологией CHIRP – это:
- длинный сигнал
- частота сигнала в разных диапазонах
Что мы получаем? Голова эхолота обрабатывает сигнал от трансдюсера который отражается от объектов в диапазоне нескольких частот.
Это дает возможность получить больше информации об объекте. Как утверждают производители это улучшает:
- лучшее шумоподавление
- растет чувствительность
- рядом стоящая рыба теперь различима на экране эхолота
Увы но не можем это ярко показать.
На наших водоемах глубина была не большая, поиск мест где бы эхолот с CHIRP проявил бы себя не увенчался успехом.
Смотрите картинку ниже: CHIRP- справа . без CHIRP – слева.

Сейчас технология CHIRP используется на многих моделях эхолотов.
Вот и все что мы хотели рассказать в данной статье. Она вам поможет разобраться в тонкостях технологий применяемых в эхолотах. А за покупкой эхолота добро пожаловать к нам на lodka.com.ua

